Discrete-time PID Controller 离散 PID 控制器
模拟式PID控制器的离散化,得到数字控制器
一、数字 PID 算法
已知连续时间的 PID 控制,拉普拉斯变换得到:
1. 位置式 PID 算法
- 稳态精度高,直观易于理解
- 计算量大,容易出现积分饱和
2. 增量式 PID 算法
- 节约内存和计算时间;控制量冲击小,能平滑过渡
- 无积分环节积累,可能存在一定误差
3. 一般 PID 算法的离散化
一般常用模拟控制器离散化#二、差分变换法 ,用后向差分,或双线性差分,并写为控制器的形式
二、改进的数字 PID 算法
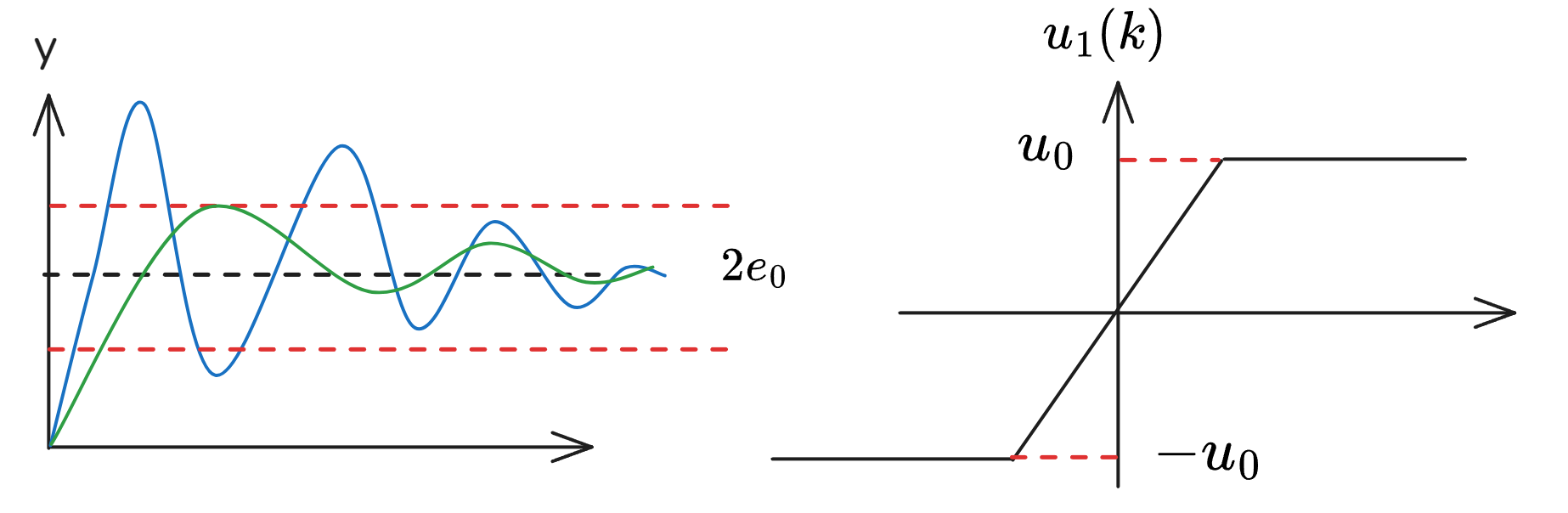
1. 积分分离算法
在系统误差较大时,取消积分作用;当误差减小到一定值时,再重新积分。 为积分分离阈值
采用 PID 控制,保证稳态误差为 0
采用 PD 控制,大幅度减小超调量
2. 抗饱和积分算法
输出限幅,输出超限时不积分
3. 遇限削弱算法
4. 不完全微分
纯微分环节对噪声很敏感,可以串接一个惯性环节来抑制高频影响
5. 微分先行
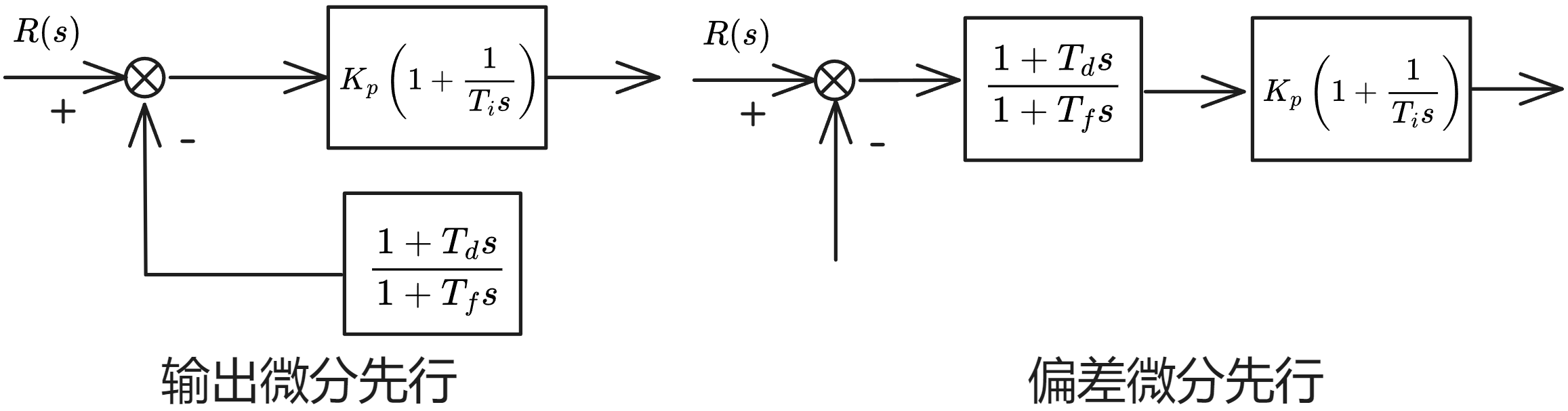
- 输出量微分:只对输出量进行微分,避免因给定值变化给控制系统带来超调量过大、调节阀动作剧烈的冲击
- 偏差量微分:对给定值和输出量均微分
6. 带死区的 PID